
Flight Model Veränderungen | Alpha 2.0
Die Zukunft des Fliegens
Seit der ersten Veröffentlichung von Arena Commander haben wir die Maximalgeschwindigkeit erhöht, die Verfügbarkeit des Boosts eingeschränkt und die Schubkraft der Manövrierdüsen eingeschränkt. Obwohl all diese Änderungen drastische Effekte für das Gameplay hatten, war keine davon eine fundamentale Änderung in Bezug darauf wie das Spiel wirklich funktioniert – was zeigt wie sehr die Balance der Schiffseigenschaften ein System beeinflusst! Hinter den Kulissen jedoch haben wir an tiefgreifenden Veränderungen des Flugsystems gearbeitet und nähern uns dem Punkt an dem wir ein Teil dieser Arbeit an die Spieler freigeben können.
Die Flug-Modi (Flight Modes) aka IFCS 2.0
Das augenscheinlichste neue Feature sind die zusätzlichen Flug-Modi: Präzision (Precision), Raumkampf-Manöver (Space Combat Maneuvers | SCM) und Reise (Cruise). Dies sind IFCS Profile welche sich auf das Verhalten der Schiffe konzentrieren, insbesondere was die unterschiedlichen Zielsetzungen in Bezug auf feinfühlige Toleranzen von Veränderungen, Kampfaktionen oder dem Flug über lange Strecken angeht. Obwohl man nur jeweils einen Flugmodus aktiviert haben kann, können das Coupled/Decoupled und eine Auswahl an Flughilfen dazu genutzt werden, den Umgang mit dem Schiff weiter zu individualisieren.
Präzisionsmodus (Precision Mode)
Wenn man (vom Flugdeck) abhebt startet man im Präzisionsmodus. Im Präzisionsmodus ist die Maximalgeschwindigkeit deutlich reduziert und die Schubkontrolle und Beschleunig und sind so angepasst, dass man eine erhöhte Kontrolle über das Schiff hat, um in einer engen Umgebung manövrieren zu können. Das erleichtert den Start und die Landung, wird aber auch die Bewegung in der Nähe von Asteroiden, Schiffswracks oder auch die Annäherung an andere Schiffe zur Betankung im Flug oder für Enterangriffe erleichtern.
SCM Modus (Raumkampf-Manöver)
Sobald man sich frei von anderen Objekten bewegen kann und Geschwindigkeit aufnehmen muss, wird man in den Raumkampf-Manövermodus wechseln wollen. Der SCM ist eine der größten Änderungen im Flugsystem, aber oberflächlich betrachtet liegt er den momentanen Flugmechaniken nahe, die bereits aus Arena Commander bekannt sind. Der echte Vorteil des SCM Modus ist die Maximalgeschwindigkeit, die nun dynamisch als Funktion aus Kraft und Masse berechnet wird: Kraft/Masse x Zeit = SCM Maximalgeschwindigkeit (F/m*t = SCM Max) – Das bedeutet das alle Veränderungen in Bezug auf die Beschleunigung des Schiffes (Veränderung der Ausrüstung, Aufnehmen von Ladung etc.) einen Einfluss auf die maximale Geschwindigkeit haben werden. Wir haben diese SCM Kalkulation insofern implementiert als dass die Maximalgeschwindigkeit, die das Schiff fliegen kann, davon abhängig ist wie gut das Schiff auf jeder Rotations-Achse (x oder z) auf Null herunterbremsen kann. Das bedeutet, dass wenn man die Manöverdüsen des Schiffes verbessert, das IFCS damit gleichzeitig automatisch eine höhere Maximalgeschwindigkeit zulässt. Außerdem wird die Geschwindigkeit von der stärksten Rotationsachse des Schiffes bestimmt, was bedeutet, dass die beste Kontrolle über Kursabweichung über die starke Achse des Schiffes erreicht werden kann, im Gegensatz zur Drehung über die schwache Achse. Jedes Schiff hat eine unterschiedliche Konfiguration an starken und schwachen Achsen und es obliegt dem Piloten, diese herauszufinden und ihre Stärken auszufliegen.
Afterburner
Es gibt einen weiteren spannenden Vorteil des SCM: Den Afterburner. Während die momentane Boost-Mechanik einem eine erhöhte Beschleunigung und Abweichungskontrolle gibt, verschafft einem der Afterburner eine höhere Maximalgeschwindigkeit während aber die relative Kontrolle gleich bleibt. Und so funktioniert das: Im SCM wird die Höchstgeschwindigkeit nach der Fähigkeit berechnet, eine bestimmte Geschwindigkeit in einer bestimmten Zeit zu erreichen. Da der Boost die Beschleunigung erhöht, erhöht sich damit auch die mögliche Maximalgeschwindigkeit. Der Boost, wie es ihn momentan gibt, wird weiter im Spiel bleiben, aber die Spieler haben in Zukunft die Möglichkeit selbst auszuwählen, wie sie ihren limitierten Boost-Treibstoff einsetzen wollen: zur Erhöhung der Maximalgeschwindigkeit um schnell Strecke zu machen oder um das Bremsen und die Manövrierfähigkeit zu verbessern.
Reisemodus (Cruise Mode)
Für lange Strecken innerhalb eines Gebiets haben Piloten nun die Möglichkeit, den Reisemodus zu nutzen. Während das Geschwindigkeitslimit im SCM dem Piloten Kontrolle unter Einschränkung der Geschwindigkeit gibt, verschafft der Reisemodus dem Piloten Geschwindigkeit unter Einschränkung der Manövrierfähigkeit. Und während die Geschwindigkeit sehr hoch ist, verändert sich jedoch die verfügbare Beschleunigung nicht, was bedeutet das es 15-20 Sekunden und mehr dauern kann, bis die maximale Reisegeschwindigkeit erreicht ist. Das Drehvermögen des Schiffes steigt nicht mit der Geschwindigkeit und es kann deutlich länger dauern zu einem vollständigen Halt zu kommen, wenn man die normalen Gegenschubdüsen des Schiffes verwendet.
Da die Reisegeschwindigkeiten problemlos das Fünffache und mehr des sicher kontrollierbaren Geschwindigkeiten, die das SCM zulässt, erreichen können, erzwingt das IFCS kontrollierte Richtungsänderungen, damit der Pilot nicht in unkontrollierbare Abdrift-Bewegungen gerät. Das bedeutet, dass die Nase des Schiffes fest auf den Geschwindigkeitsvektor gerichtet ist und die Manöver, die man im Reisemodus durchführen kann, eher Kurskorrekturen entsprechen denn wirklichem Kurvenflug. Es ist selbstverständlich, dass der Reisemodus absolut nicht dafür gedacht ist, im Kampf, in Asteroidenfeldern oder in Flugschneisen mit hohem Verkehrsaufkommen eingesetzt zu werden.
Natürlich kann der DeCoupled Modus jederzeit eingesetzt werden, um während der Reisegeschwindigkeit frei um die eigene Achse zu rotieren. Clevere Piloten lernen schnell wie man den DeCoupled Modus nutzt, um ihre Haupttriebwerke zum boosten oder bremsen einzusetzen. Andrerseits werden die Piloten schnell merken, dass wenn man den DeCoupled Modus nutzt um während der Reisegeschwindigkeit eine 90 Grad Kursänderung vorzunehmen, man ein Expressticket ins Traumland gebucht hat, da die hohen G-Kräfte eines solchen Manövers sofort zu einem Black- oder Red Out führen werden.
Quantensprung (Quantum Leap)
Über dieses Flugmodi hinaus wird es den Quantum Travel geben, die eine Funktion in der alle Schiffe auf die gleiche Höchstgeschwindigkeit von 0.2c der Lichtgeschwindigkeit limitiert sind. Sobald der Quantum Drive aktiv ist, wird das Schiff schnellstmöglich bis auf das 0.2c Limit beschleunigen – auf kurzen Sprünge wird man diese Geschwindigkeit vielleicht nie erreichen – während das Schiff selbst eine relativ geringe Beschleunigung erfährt. Während dieser Geschwindigkeiten können schon kleinste Veränderungen des Flugvektors zu massiven Abweichungen in der Flugrichtung führen, wodurch langsamere Schiffe hier die Möglichkeit haben, einem Angriff von schnelleren Schiffen zu entkommen. Natürlich ist die Reise in diesen unglaublichen Geschwindigkeiten gefährlich, weshalb der Schiffscomputer automatisch den Quantum Travel unterbricht, sobald eine mögliche Kollision entdeckt wird oder das Schiff an einer Stelle kein aktives Schild mehr hat.
Motion Control
Die größte Veränderung des IFCS ist der Umzug in ein dreidimensionales Motion Control-System. Vor dieser Version hat das IFCS ein Feedback-Steuersystem für die Raumschiff Bewegungssteuerung verwendet. Das Bewegungsprofil für dieses Feedback-Steuersystem (ein PI-Regler) ist eine exponentiell gedämpfte Sinuskurve. Der Graph in Abb. 1 zeigt sowohl die Beschleunigungs- und Geschwindigkeitskontrolle sowie die Geschwindigkeitssollwertänderungen von 0 bis 100 m / s.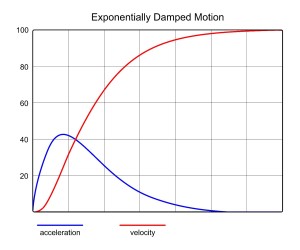
Dies ist ein iteratives Kontrollsystem, das keine Annahmen über den vergangenen oder zukünftigen Zustand eines Systems macht und nur die Fehler zwischen dem aktuellen Stand und dem Zielzustand des Schiffes glättet. Aus diesem Grund ist es gut geeignet für unsere Anforderungen, in denen Schadensfälle und unerwartete externe Kräfte eine unvorhersehbare Bewegung verursachen.
Um die Sache noch komplizierter zu machen, ist das echte In-Game Bewegungsprofil begrenzt, denn das IFCS ist durch die tatsächliche Schubkraft der Schiffstriebwerke limitiert. Dieses Profil ist in Fig . 2 gezeigt, mit dem nicht begrenzten Profil als Referenz dahinter.
Der Graph in Abb. 2 zeigt eine ziemlich genaue Darstellung der aktuellen Geschwindigkeitssteuerung für Raumschiffe in Star Citizen, sowohl für die Lineare- als auch die Rotationskontrolle. Zwar hat dieses Bewegungsprofil viele Vorteile, jedoch ebenfalls einige wesentliche Nachteile, darunter a) die Schwierigkeit der Vorhersage der zukünftigen Zustands eines Schiffes, welches sich unter diesem Controller bewegt, und b) eines asymmetrischen Regelverhalten mit einer erweiterten Einschwingzeit. Insbesondere haben die Spieler oft festgestellt, dass die erweiterte Einschwingzeit die Schiffe in Star Citizen unpräzise (“schlampig”) zu steuern macht.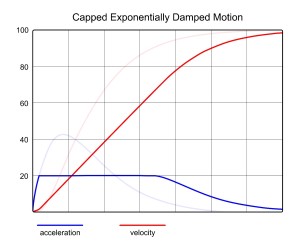
Um diese Probleme anzugehen, wird die neue Version von IFCS mit einer Bi-Level-Steuerung beginnen. Die erste Ebene, Vorsteuerung, berechnet die ideale Bewegung des Schiffes, während die zweite Ebene, Regelung, die Fehlerkorrektur durchführt, um das Schiff so nahe an der idealen Bewegung wie möglich zu halten, auch bei Schäden und dem Auftreten von unerwarteten externen Kräfte. So ist der aktuelle Bewegungs-Algorithmus immer noch Teil des Systems und bietet dieselbe Fehlertoleranz, aber es wird nicht länger das dominante Bewegungsprofil (außer bei extremen Systemfehlern) sein.
Das Feed-Forward-Steuerungssystem wird die ideale dreidimensionale Bewegung verwenden, wie der Graph in Abb. 3 zeigt.
Im Gegensatz zum Rückkopplungsalgorithmus ist dieses Bewegungsprofil völlig vorhersehbar. Zu jeder Zeit ist bekannt, wie lange es dauert, bis ein Schiff eine neue Geschwindigkeit oder Position erreicht, und dies von jeder Anfangsbedingung aus. Außerdem kann die Anlaufphase der Beschleunigung so abgestimmt werden, dass die Schiffe eine natürliche, gleichmäßige Bewegung haben, ohne übermäßiges Setzverhalten des momentanen Steuersystems.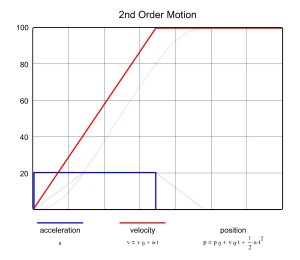
In der Praxis wird dies in einer breiten Palette von reaktionsschnellem und ruckartigem Schiffsflugverhalten führen, wie ein Hochleistungssportwagen, oder zu einer weniger direkten, aber sanfte Steuerung, wie ein Luxus-Auto.
Die Änderungsrate der Beschleunigung nennt man “Ruck”, und es ist im Wesentlichen die Beschleunigung der Beschleunigung. Eine einfache Möglichkeit, den Ruck zu verstehen, ist zu überlegen, wie man ein Auto fährt. Verlangsamt man ein Auto zu einem Halt, indem man konstanten und gleichmäßigen Druck auf das Bremspedal gibt, wird das Auto in einer linearen Geschwindigkeit verlangsamt. Aber wenn man den gleichen Druck auf das Pedal direkt bis zum vollen Stop ausübt, fühlt sich der Übergang zu 0 Geschwindigkeit nicht glatt an sondern abrupt. Aber wenn man immer weniger Druck auf die Bremse ausübt, während man sich der 0 Geschwindigkeit nähert (die Bremsung „abfedert“), wird sich die Verzögerungsrate ändern und der Halt ist viel weicher und komfortabler. Die Bremsung abzufedern ist eine Aktion ohne großen Ruck, während bei einer plötzlichen Bremsung ein hoher Ruck entsteht.
Der Graph in Fig. 4 zeigt als Referenz die typische zweidimensionale Bewegung (konstante Beschleunigung, lineare Geschwindigkeit), die in vielen Spielen verwendet wird.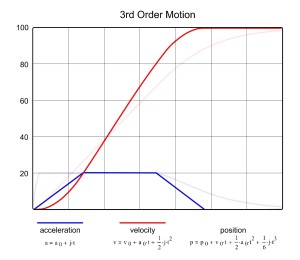
Während die zweidimensionale Bewegung ein viel einfacheres Steuerungsmodell ist, produziert es eine sehr steife, mechanische Schiffsbewegung. Das dreidimensionale System wird es uns ermöglichen, die Schiffe so steif oder so glatt zu gestalten, wie sie sein müssen.
Balancing
Das Balancing des Flugverhaltens der Schiffe gehört zu den schwierigsten und heikelsten Angelegenheiten des gesamten Projects. Der Schritt hin zur 3rd Order Motion also dem Hinzufügen eines zusätzlichen Geschwindigkeitsmodi haben dazu geführt, dass ein komplettes Rebalancing des Flugverhaltens nötig ist. Das heißt, dass sich in Zukunft jedes Schiff anders anfühlen wird, als Ihr das im Moment aus dem Arena Commander gewohnt seid.
Besonders bemüht waren wir, dass jedes Schiff seine Positionierung den anderen Schiffen gegenüber weiterhin behält. Uns sind uns bewusst, dass Änderungen dieser Größenordnung für leidenschaftlich- kontroverse Diskussionen der Art: „Altes gegen Neues System“ sorgen wird, sind uns aber sicher, dass sich die Schiffe soweit echter anfühlen werden und eine stärkere Persönlichkeit bei besserer Kontrollierbarkeit besitzen.
Das wechseln zum „Katapult” bedeutet, dass plötzliche Eingaben oder Ausweichen auf natürliche Weise generft werden. Das System macht jetzt deutlich langsamer gegensätzliche Bewegungen und reagiert allgemein träge. Diese Bewegung dritter Ordnung (Diagramm s.O.) ist auch für unser Gehirn sehr leicht zu verinnerlichen und intuitiv. Das verhindert auch das Übersteuern.
Mit dem “Jerk” als Parameter, steht nun ein neues stabiles Flugverhalten zur Verfügung.
Im Wesentlichen ist damit gemeint, dass die Triebwerke bei schwerer Beladung, in Relation zu ihrer Größe abgestimmt werden können – gemeint ist dabei z.B. eine Hull oder Aurora, dass diese damit nicht gleich zum schnellsten Schiff im ‘Verse werden, wenn sie unbeladen sind. Weil natürlich alle Schiffe unbeladen schneller fliegen als voll beladen, können wir nun die verschiedensten Schiffe mit unterschiedlichsten Leistungseinbußen versehen, sobald diese Fracht mit sich führen. Im ersten Schritt werden wir das auf dem PTU veröffentlichen und das wird es auch sein: der erste Schritt. Der allgemeine Tenor damit ist, die Richtung jedes einzelnen Schiffes vorzugeben, nicht damit das endgültige Ziel zu setzen. Wir werden weiterhin kontinuierlich Spieletests vornehmen und uns Euer Feedback annehmen, damit wir unbeabsichtigte Folgen an allen Ecken und Kanten angehen können. Es wird ein paar kleinere Konsequenzen aufgrund dieser Änderungen nach sich ziehen, aber für den Moment – lasst uns lieber über die Rangierschubregelung sprechen.
Der erste Durchlauf, den wir auf dem PTU testeten, war nicht mehr, als ein erster Test. Es soll nur die grobe Richtung bestimmen, nicht das Ziel. Wie immer werden wir weiter testen und tunen. Wir werden uns die Sache weiter anschauen, um weiter an groben Ecken zu feilen.
Es gibt noch ein paar kleine weitere Konsequenzen, aber dazu später, reden wir erst einmal über ‘Schubsteuerung’.
Schubsteuerung ist der Prozess, bei welchem der Schub, welcher im Haupttriebwerk erzeugt wird, durch ein Rohrsystem geleitet wird und schließlich kontrolliert gesteuert durch die Manövertriebwerke (oder ‘mavs’ wie sie die Community nennt) austritt, wo die Kraft dann genutzt wird.
Das bedeutet, dass das Haupttriebwerk viel wichtiger wird, als dies im Moment im Arena Commander absehbar ist, und etwas weiter gedacht, bedeutet es, dass wir Raumfüllende Triebwerke auf den Großkampfschiffen haben werden. Anstatt, dass das ganze Schiff mit kleinen Triebwerken zugepflastert wird, haben wir nur kleine Staudüsen, welche der Kraft die Richtung vorgeben aber keine Erzeugen. Dies heißt allerdings auch, dass das Ganze Antriebssystem in Mitleidenschaft gezogen wird, wenn das Haupttriebwerk Schaden nimmt. Sollte das passieren hat ein Schiff interne Notsysteme, die ‘Minimalstmanövrierung’ erlauben, nur sehr schwach und langsam. Das fantastische daran ist, was für Möglichkeiten dies für Kampfsituationen schafft.
Ein beschädigtes Versorgungsrohr verringert die Leistung, die bei der Staudüse ankommt, und könnte auch im Falle eines Schadens unerwarteten Schub geben.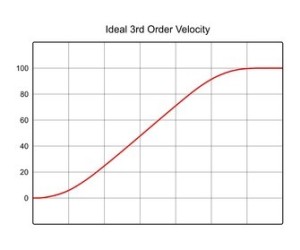
Die Düsen selbst haben Werte für Hitze und Leistung, diese limitieren den absoluten Schub der grade verfügbar ist. Dieses Limit kannst du aber, auf eigene Verantwortung, überschreiten. Aus all diesen Einzelwerten bildet sich das Verhalten eures Schiffs, verstärkt durch die Anzahl bzw. Position der Thruster, deren Zustand und des Designs eures Schiffs. Ein guter Pilot der die Grenzen seines Fluggeräts kennt, kann seine Maschine also an das absolute Limit, auf den schmalen Grat zwischen h
eroischen Erfolg und Katastrophe zwingen.
Es gibt also sehr viele Abweichungen des Schiffs von dem Zustand, welchen der IFCS als Idealzustand ansieht. Im Moment erlauben wir dem Kontrollsystem die volle Kontrolle unter Idealbedingungen und das führt meist zu mechanisch anmutenden “tot” wirkenden Bewegungen. Mit der neuen Version ist das geschichte. Man wird nahezu immer irgendwelche Thruster oder Systemfehler spüren. Unter Optimalbedingungen fühlt sich das dann an wie kleine Turbulenzen, bei Beschädigungen, Überhitzung oder anderen Gründen können diese “kleinen” Fehler aber größere Auswirkungen haben.
Der letzte Graph zeigt das idealisierte Modell der Beschleunigung während der “3rd Order Velocity” (“Katapultstarts”) und das IFCS wird auch alles Tun um etwa dieses Leistungsbild zu produzieren.
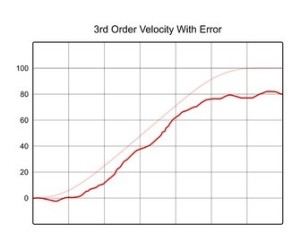
Warum auch immer, Thruster Störungen haben können, falscher Vector oder Schub, unstabiler Kurs,etc. , kann die reale Bewegung sehr vom Idealbild abweichen.
Der rechtsstehende Graph zeigt das ganz gut wie die reelle Beschleunigung von der ideellen abweicht (1-100m/s).(Jede Aktion des Schiffs ist im Prinzip Beschleunigung, niemals einfache Geschwindigkeits- oder Kurskorrekturen)
Auch die Endgeschwindigkeit muss nicht die selbe sein wie in Fig.6 gut zu sehen ist. Das IFCS fordert die obige Geschwindigkeit bekommt jedoch nur die real mögliche.
Hier kommt das ursprüngliche Rückmelde-System ins Spiel. Es schaut sich den aktuellen Schiffsstatus im vergleich mit dem Ausgangszustand an und korrigiert über dieses Modell die Bewegungen so gut es geht.
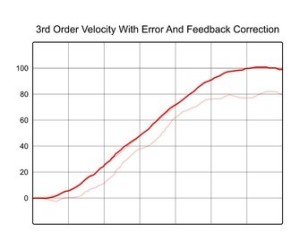
Das beispiel, welches hier gezeigt wird ist die Geschwindigkeit nach der Rückmelde-KorrekturEin offensichtlicheres In-Game beispiel wird jedoch die “Haltungskontrolle”
Das IFCS hat ein Reaktionskontrollsystem (RKS), welches eine vom Piloten voreingestellte Grundhaltung beibehält, so kann das Schiff auf die eigenen Bedürfnisse angepasst werden und reagiert, richtig getrimmt, absehbarer. Durch Thrusterstörungen kann das veränderte Flugmodell im IFCS natürlich stärker vom Idealzustand abweichen – auch darauf stellt es sich aber dank des Rückmeldesystems richtig ein, sodass das Ansprechverhalten eurer Maschine immer so gut es geht eurem Wunsch entspricht – Natürlich abhängig vom genommenen Schaden.
Fortsetzung folgt…
Vielen Dank für die Übersetzung. Ihr macht einfach einen tollen Job.
Ich freue mich auf den nächsten Teil 😉
Gruß
Oxe
Danke für diese und die vieeelen anderen Übersetzungen. Für mich ist Eure Arbeit immer wieder eine grosse Hilfe.
Bei der Original Transmission auf RSI sind die Grafiken 3 und 4 (“2nd Order Motion” und “3rd Order Motion”) in anderer Reihenfolge dargestellt wie bei dieser Übersetzung. Habt ihr das mit Absicht so gemacht?
Gruß
7th_dragon
Wenn man das alles so liest könnte man ja fast glauben die Alpha 2.0 kommt noch vor ? raus. Träumen kann man ja mal ?.
Danke für die vielen Übersetzungen ?
Ja das kann ich mir auch gut vorstellen, dass es noch vor Weihnachten 2016 kommt 😉
Vielen dank für die Übersetzung….
Hm hoffe das wird nicht wie bei elite. Von einem Instanzwechsel beim übergang in cruise haben nichts gesagt ja ?
Der dumme Supercruise is das was mir am meisten aufn Sack geht bei elite
Ich will ja nicht pingelich sein aber die Übersetzung klingt streckenweise etwas sehr denglisch. Gibt es bei euch die Möglichkeit Nachbesserungen zu contributen? Das was mir vorschwebt ist zunächst ein Rankingsystem mit dem Übersetzungen bewertet werden können. Damit können z.B Externe ggf. motiviert werden sich für Revisionsarbeiten zu melden. Ein 4-Stufen Bewertungssystem könnte so aussehen: 4-googleTranslisch, 3-denglisch, 2-deutsch, 1-literarisch
kann man drüber nachdenken, jedoch gibt es bei dem Englisch, was die CIG Mitarbeiter verfassen, des öfteren Passagen, die entweder denglisch oder sehr sehr frei übersetzt werden müssen.
Danke für die Kritik, wir werden mehr drauf achten 😀